Delphi FAQ - Часто задаваемые вопросы
| Базы данных |
Графика и Игры |
Интернет и Сети |
Компоненты и Классы |
Мультимедиа |
|
ОС и Железо |
Программа и Интерфейс |
Рабочий стол |
Синтаксис |
Технологии |
Файловая система |
|
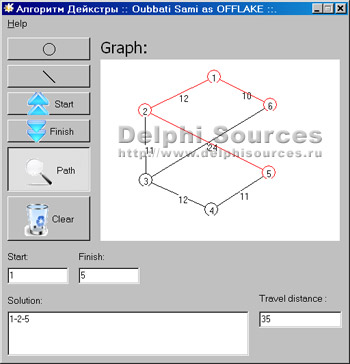
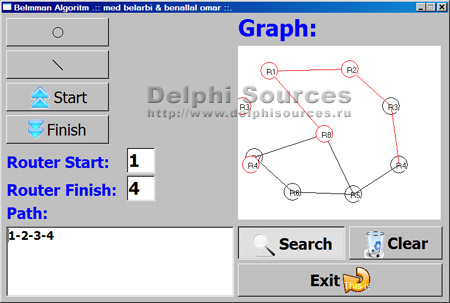
Алгоритм обхода препятствийАвтор: Алексей Моисеев Предлагаемый алгоритм обхода препятствий - это, так называемый, обобщенный алгоритм Дейкстры. В англоязычной литературе он называется алгоритмом A*. Реализация алгоритма: скачать проект (191 К)
Алгоритм этот проще реализовать, чем описать: Start - начальная клеткаFinish - конечная клетка. Алгоритм итерационный 1 шаг: Помечаем Start как граничную точку. 2 шаг: Среди всех граничных точек находим Клетку1 - клетку с минимальной суммой оценки пройденного пути g и оценки оставшегося пути h. 3 шаг: Для Клетки 1 рассматриваем соседей. Если сосед имеет статус непосещенного, то мы обозначаеми его как граничную клетку, и указываем Клетку1 как предыдущую для него. Оценку g1 для соседа принимаем равной g+p, где p-стоимость прохождения по клетке сосед, а g - оценка пройденного пути для Клетки1 . Оценка h для любой клетки равна длине кратчайшего пути (по прямой от рассматриваемой клетки до клетки Finish) Рассматриваемую Клетку1 помечаем как отброшенную. 4 шаг: Если на предыдущем шаге один из соседей оказался равен клетке Finish, то путь найден. Если ни одного нового соседа не существует, то нет и пути. 5 шаг: Переход на шаг 2. Буду рад любым предложениям по оптимизации, так как меня, к сожалению, не устраивает быстродействие. |

Похожие по теме исходники |
|
|
|
Copyright © 2004-2024 "Delphi Sources" by BrokenByte Software. Delphi World FAQ
